Страто-планер
После десятка разных запусков мы уже привыкли, что место приземления нашего стратосферного добра оказывается где-то в глухом лесу или непроходимом болоте. Вот и приходится потом долго пробираться по буреломам, отбиваясь от полчищ комаров, чтобы забрать камеры или результаты эксперимента. В одном из таких походов, когда я шёл по ночному зимнему лесу по колено в снегу, мне очень захотелось сделать так, чтобы из стратосферы нагрузка возвращалась к нам сама. И для решения этой задачи я решил вернуть оттуда радиоуправляемый самолёт.
В качестве платформы я взял самолёт схемы крыло, как наиболее крепкую конструкцию. Поставил на него мощный видеопередатчик, курсовую камеру с возможностью наклона, ГоПрошку, дальнобойное радиоуправление, автопилот, дополнительный самодельный логгер, пишущий высоту, координаты, скорость, температуру и пару поисковых маяков: GSM и спутниковый.
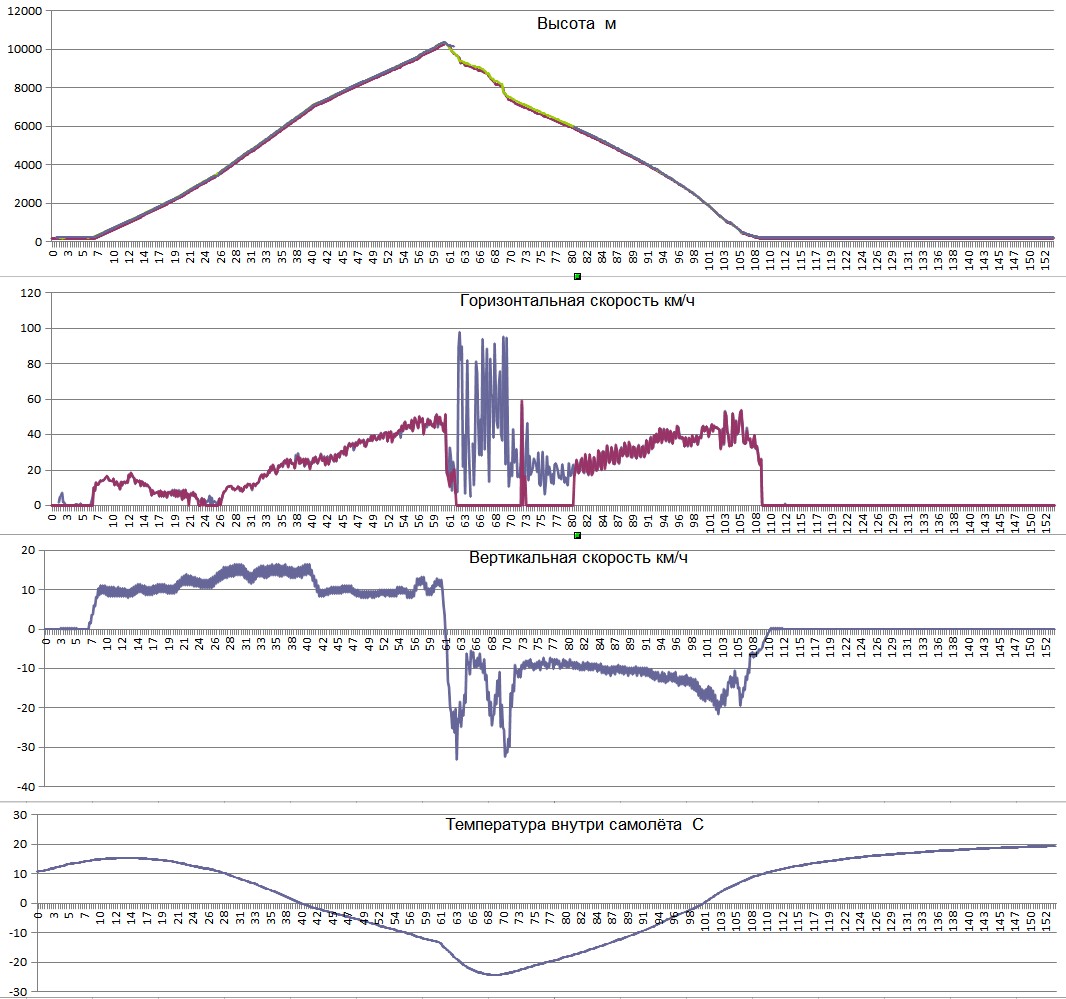
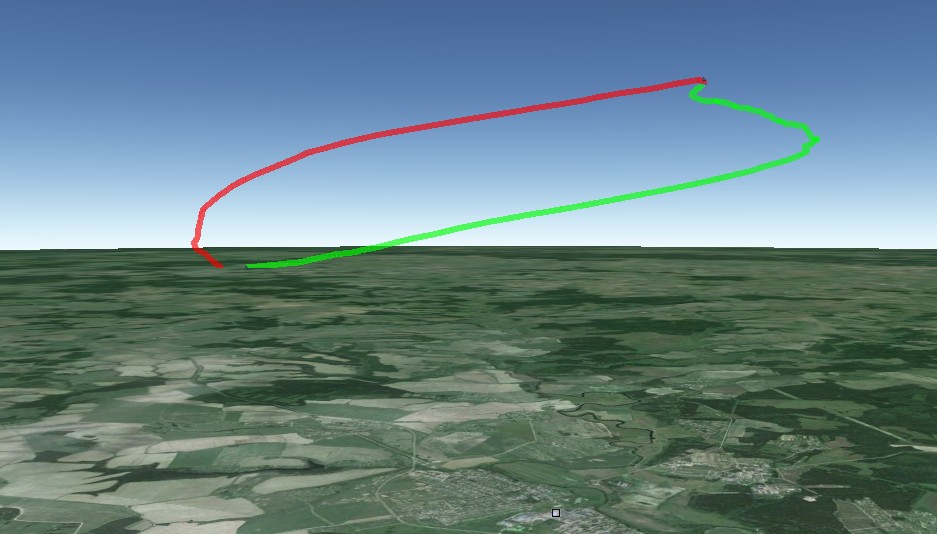
И вот провёл первый тестовый полёт. Самолёт был прикреплен к стратосферному зонду. Зонд накачан и запущен. День был облачным, и довольно долго пришлось смотреть бегущие цифры телеметрии на совершенно белом экране. Мы были очень рады, когда в кадре появились проблески голубого неба, лучи солнца и перина облаков, но уже внизу. Потихоньку мы добрались до высоты 10 км, при этом удаление было уже около 30 км. Тут уже начала пропадать видео картинка. Но лететь по ней казалось ещё можно. По крайней мере, линия горизонта была видна, а телеметрия читалась. Я включил режим отцепки и начал ждать самого интересного… Но во время отцепки, судя по всему, фал зацепился за антенну видеопередатчика, и её наклонило самым невыгодным образом. Дыра в её диаграмме направленности расположилась по направлению вперёд и вниз, то есть ровно туда, где находились мы. Соответственно, в тот момент, когда самолёт направлялся домой, видео пропадало совсем. С постоянно пропадающим видео было сложно понять, что с ним происходит. В редкие мгновения появления картинки было заметно, что самолёт пытается стабилизироваться, но что-то ему мешало. Возможно, сервоприводы элеронов замёрзли, ведь температура за бортом была порядка -50 градусов. При этом высота плавно падала, а расстояние до самолёта постоянно увеличивалось. Видимо, в первую очередь виноват был ветер. На этой высоте он был около 100 км/ч. Опустившись на километр, самолёт отдалился от нас уже более чем на 40 км. Видео практически полностью пропало. Я включил режим автоматического возврата домой, отложил пульт и начал готовиться к работе с поисковыми маяками, прикидывая ориентировочное место приземления километрах в ста от места запуска.
Но через несколько минут на экране вдруг появился видео сигнал. Покрутив антенну и найдя наилучшее направление, мы заметили, что самолёт довольно уверенно и стабильно снижается и держит курс ровно на дом. Высота была порядка 7 км, а дальность около 35 км, и она стабильно уменьшалась. Горизонтальную скорость автопилот держал порядка 60 км/ч, теряя высоту примерно по 3-4 м/с. Мои попытки управлять самолётом вручную удавались явно хуже, чем это делал автопилот. На изменение тяги двигателя самолёт не реагировал. Как выяснилось позже, к этому моменту самолёт стал просто планером. То, что делал автопилот, казалось очень близким к идеальной траектории. Поэтому нам оставалось только наблюдать за уменьшающимися цифрами расстояния и высоты. На картинке мы видели лишь плотную облачность где-то далеко внизу и живописный закат, который оказался ровно в направлении точки «дома». В течении получаса мы спорили, дотянет самолёт до нас или нет. В это время самолёт вошёл в облака и я взял в руки пульт, готовясь к попыткам помочь ему дотянуть до дома. А долететь ему оставалось всего около 5 км. К моменту выхода из облаков солнце уже зашло да и обе камеры то ли замёрзли, то ли запотели. В общем, даже линию горизонта определить было сложно. Единственное, что мы видели, это градиент из тёмного снизу в светлый сверху. Высота была около 500 м, но до дома надо было протянуть ещё 3 км. Отслеживая высоту, скорость и крен по приборам, я пытался максимально продлить полёт вручную, а опустившись до нуля по высоте, пытался в слепую посадить его. Мой автопилот настроен после приземления показывать максимальную достигнутую высоту и координаты своего положения. Так вот то, что самолёт сел, я понял лишь когда высотомер выдал на экран 9999 м (ещё при подъёме мы узнали, что это максимум, который он может показать). Не дотянул он до нас всего 1 км.
Когда мы дошли до координат, выдаваемых автопилотом, мы поняли, что наше крыло совершило очень мягкую посадку, но кроме загнутой антенны обнаружилась ещё одна проблема… Вместо двигателя и пропеллера зияла дыра. Позже на записи с бортовой камеры я увидел момент отрыва двигателя (6.05). Судя по видео, самолёт свалился в пике и разогнался до такой скорости, когда винт начал работать в качестве парашюта. А 30% газа, включающиеся при FS, видимо, не дали винту сложиться. Так, судя по всему, путь с 9-километровой высоты и 40-километрового удаления наш самолёт проделал без двигателя.
Самое обидное, что из двух наземных видео-писалок одна записала только подъём до 4 км, после чего выключилась, а вторая писала весь полёт, но в самом конце зависла и не сохранила файл. Соответственно, у меня есть лишь видео всего полёта с ГоПро без телеметрии и лишь с облаками в кадре и логи всего полёта в текстовом виде, из которых я сделал несколько графиков.




Теперь я собираюсь подправить самолёт и наземную станцию и буду готовиться миновать рубеж в 20 км высоты.
P.S. На подобные полёты я получаю разрешение в нескольких инстанциях, включая зональный и главный центр управления воздушным движением, который устанавливает временный режим до высоты 30 км с ограничением полётов для других Л.А.
Многие решения явно сырые из-за недостатка бюджета и времени. И если вы вдруг готовы чем-то помочь, то буду рад.